تشغيل محركات الروبوت
نبذة:
بعد طباعة هيكل جسم الروبوت وشراء اجزء الروبوت الخاص بك ، ستبدأ في برمجة الروبوت. الخطوة الأولى في البرمجة هي جعل العجلات تتحرك.الأجزاء التي أستخدمها
- بالنسبة إلى روبوتي ، أستخدم Arduino Mega 2560 باعتباره الدماغ الرئيسي للروبوت. لدى هذي الشريحة 54 دبابيس رقمية (Digital) و 16 دبابيس تناظرية (Analog) ، مما يجعلها كافية لبناء الروبوتات.
- النسبة للمبتدئين في الالكترونيات , تساعد ال Motor Shield او الدرع المحرك في التحكم في محركات متعددة في نفس الوقت.
- أنا أستخدم L293D لدرع المحرك الخاص بي. تأكد من اختيار درع محرك يعمل بشكل جيد مع الشريحة الخاصة بك.
- المحركات التي أستخدمها هي محركات DC عادية (يمكن العثور عليها حتى في الألعاب). هذا الرابط مثال: هنا



ايصال القطع مع بعض
- اولاً ، قم بتوصيل رقاقة Arduino بالكمبيوتر المحمول باستخدام كبل USB الخاص به ، كما هو موضح في الصورة. قم بتنزيل برنامج Arduino من موقع الويب: هنا
- تأكد من أن ضوء رقاقة Arduino شغال مما يشير إلى أنها متصلة ومتعرف عليها بواسطة الكمبيوتر المحمول. قم بتركيب درع المحرك أعلى رقاقة Arduino بطريقة مرتبة ، كما هو موضح في الصورة. حمل مكتبة الدرع من الرابط:
- و من ثم اضف المكتبة في برنامج الArduino.
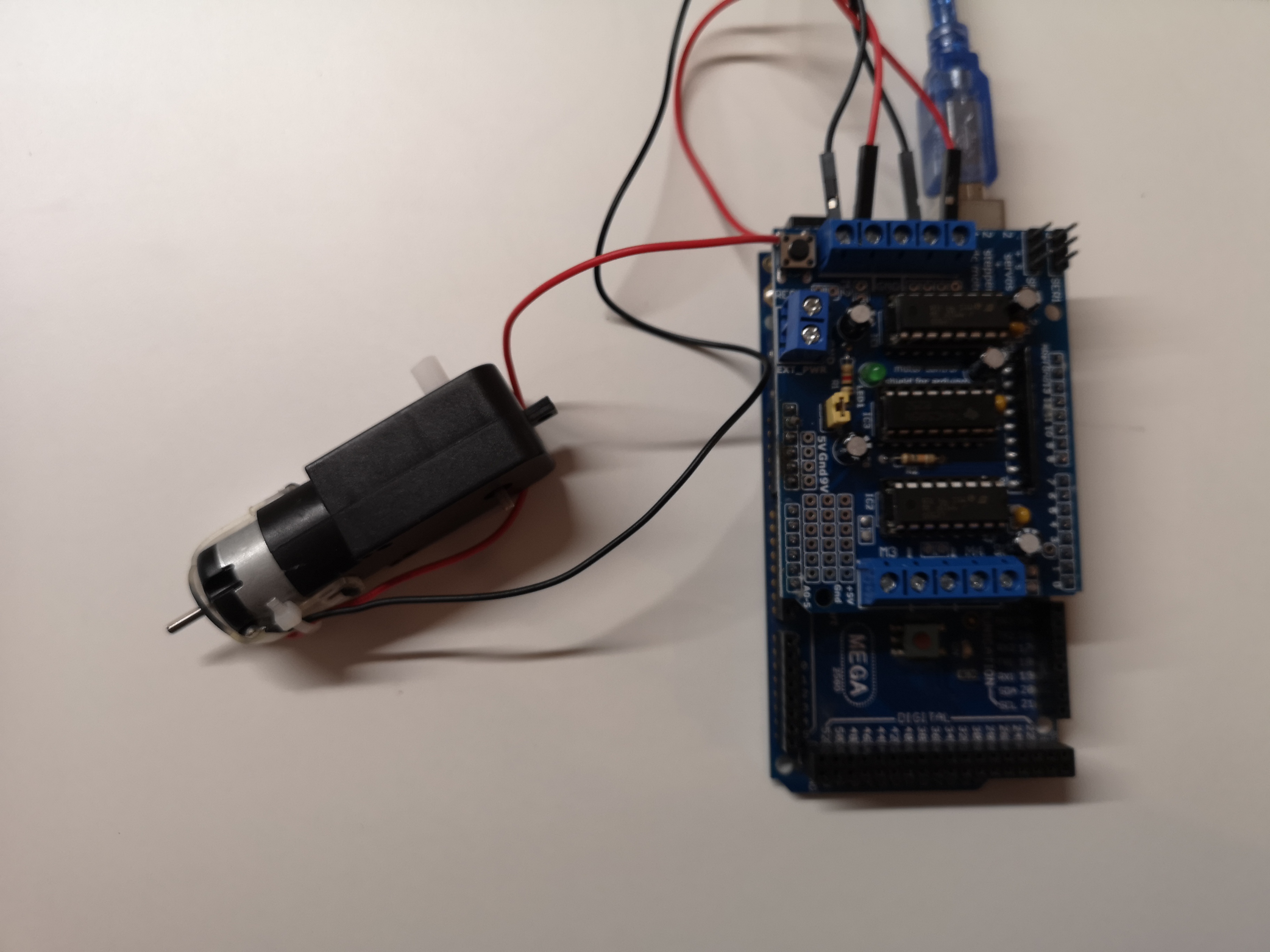
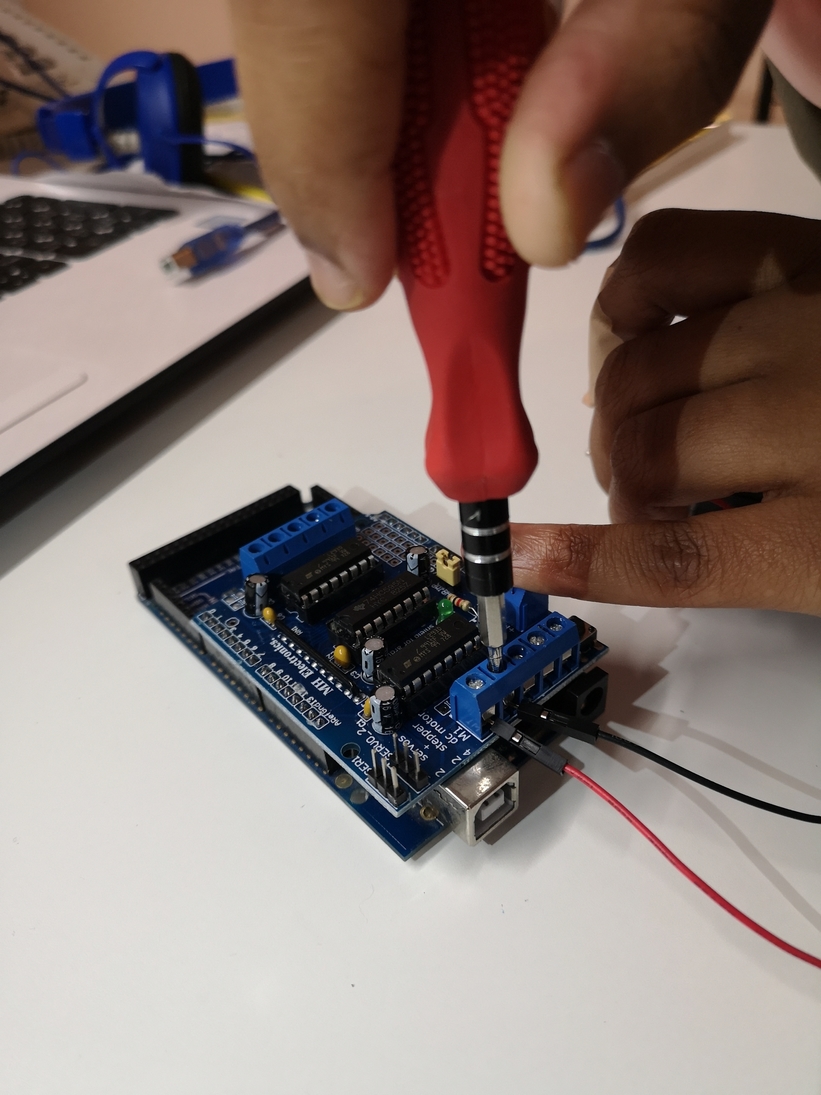
- اشبك المحركات الDC في الدرع كما في الصورة. سوف تحتاج إلى ربط الأسلاك الحمراء والسوداء لكل محرك داخل إحدى فتحات M. انت الان جاهز لكتابة البرنامج و تشغيل المحركات.

تشغيل البرنامج
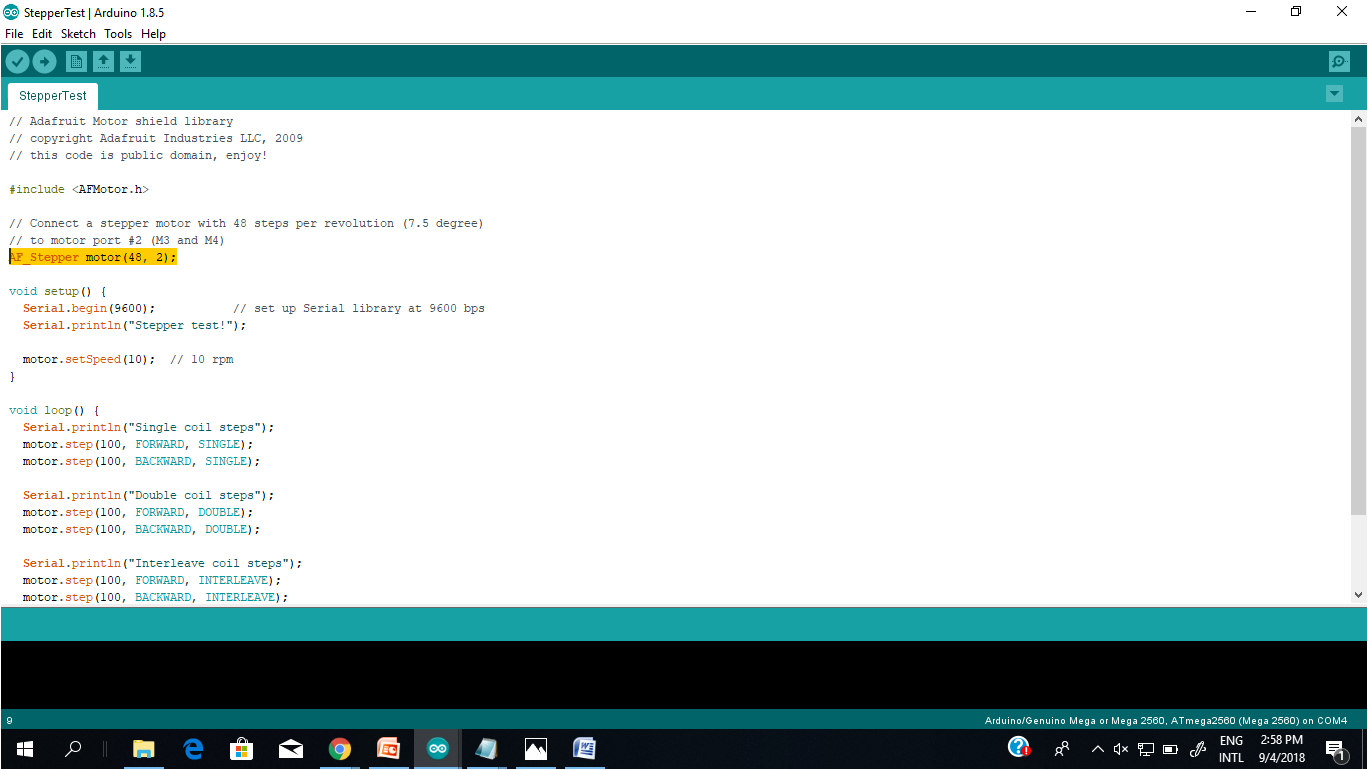
- بعد إضافة المكتبة ، انتقل ضمن الأمثلة وابحث عن StepperTest. شغل الكود عن طريق النقر على زر RUN. سوف تبدأ محركاتك في التحرك. الرقم الموضح أدناه هو رقم المحرك. يمكنك تغيير الرقم على حسب المحرك في متحة M1, M2, M3 او M4.
;(2,AF_Stepper motor(48
هذه هي الخطوة الأولى في البرمجة. بعد ذلك ، سيكون علينا إضافة العجلات. ارجو متابعتي في البوستات القادمة لمعرفة المزيد في بناء روبوت ^^
درس مميز
مجهود رائع
توثيق وعمل جميل
رووعة ماشاء الله
مجهود تشكرون عليه
شرح وافي وكافي شكرا لكم